
Using an Adaptive Neuro-Fuzzy Inference System to Predict Dilution Characteristics of Vertical Buoyant Jets Subjected to Lateral Confinement


Abstract
:1. Introduction
2. Methodology
2.1. Fundamental Analysis
2.2. Experimental Data
2.3. The ANFIS Algorithm
- (1)
- The rule base of some fuzzy if–then rules;
- (2)
- A database that defines membership functions of fuzzy sets using fuzzy if–then rules;
- (3)
- Decision-making units that perform reasoning operations on rules;
- (4)
- A module that transforms explicit input into a fuzzy interface that matches the value of the language;
- (5)
- A module that transforms the fuzzy result obtained by reasoning into a clear output deblurring interface.
- (1)
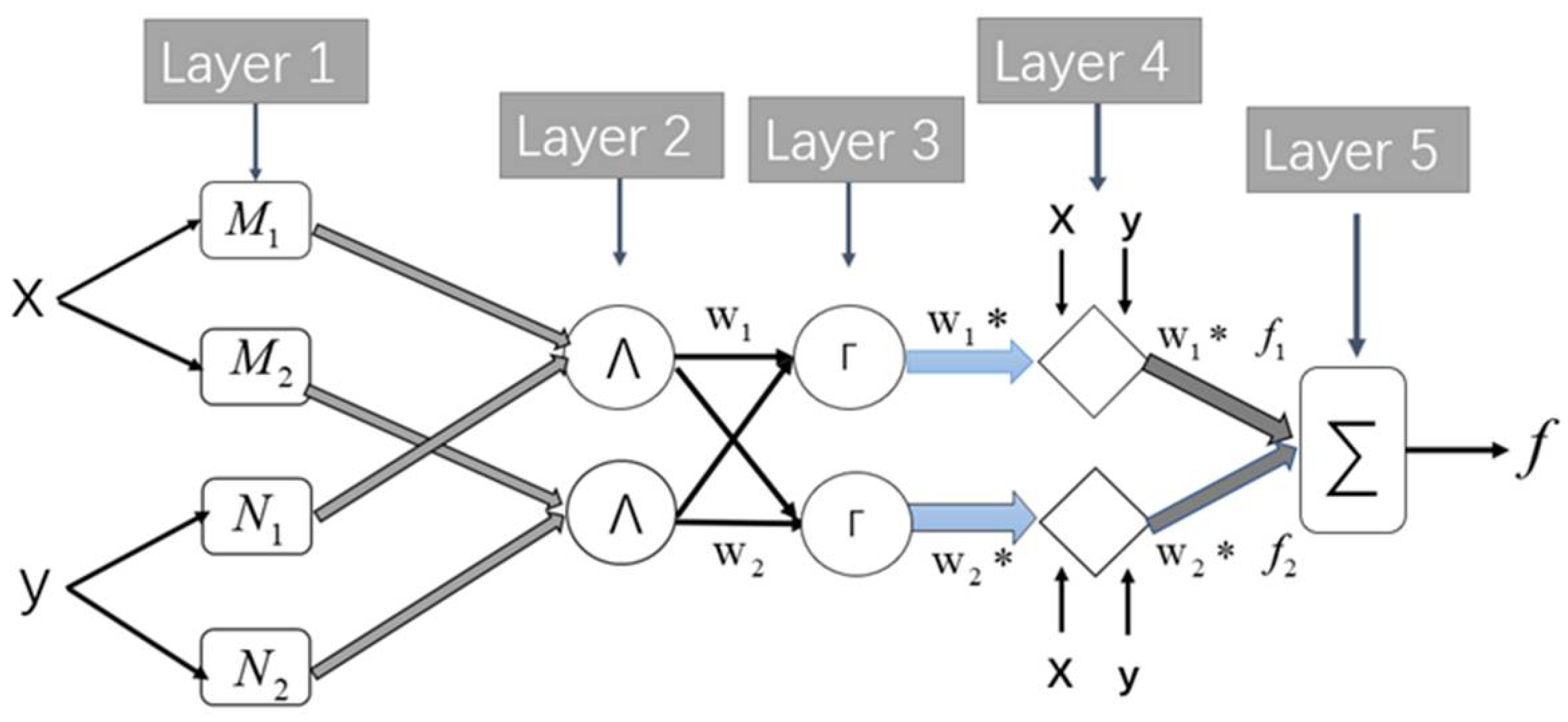
- The input x, y is fuzzification in the first layer, for simplicity, assuming that the rule base contains two fuzzy rules [30]: fuzzification membership of a 0~1, usually represented by U Ai,U Bi
- (2)
- In the second layer, the membership of each feature multiplier yields the trigger strength wi for each rule. Each node in this layer is a circular node marked as Λ.
- (3)
- The third layer normalizes the trigger strength of each rule obtained from the previous layer as the ratio of the sum of the emission intensity of Rule 1 to the firing intensity of all rules, indicating the trigger proportion of the rule in the whole rule library. Each node in this layer is a circular node marked as Γ.
- (4)
- The results of the fourth inference layer and generally given by a linear combination of input features, and the parameters in that layer will be known as subsequent parameters.
- (5)
- The fifth layer’s defuzzification yields the exact output, and the final system output is the sum of the results for each rule.
2.4. The ANFIS-Based Model
2.5. Performance Indices
3. Results and Discussion
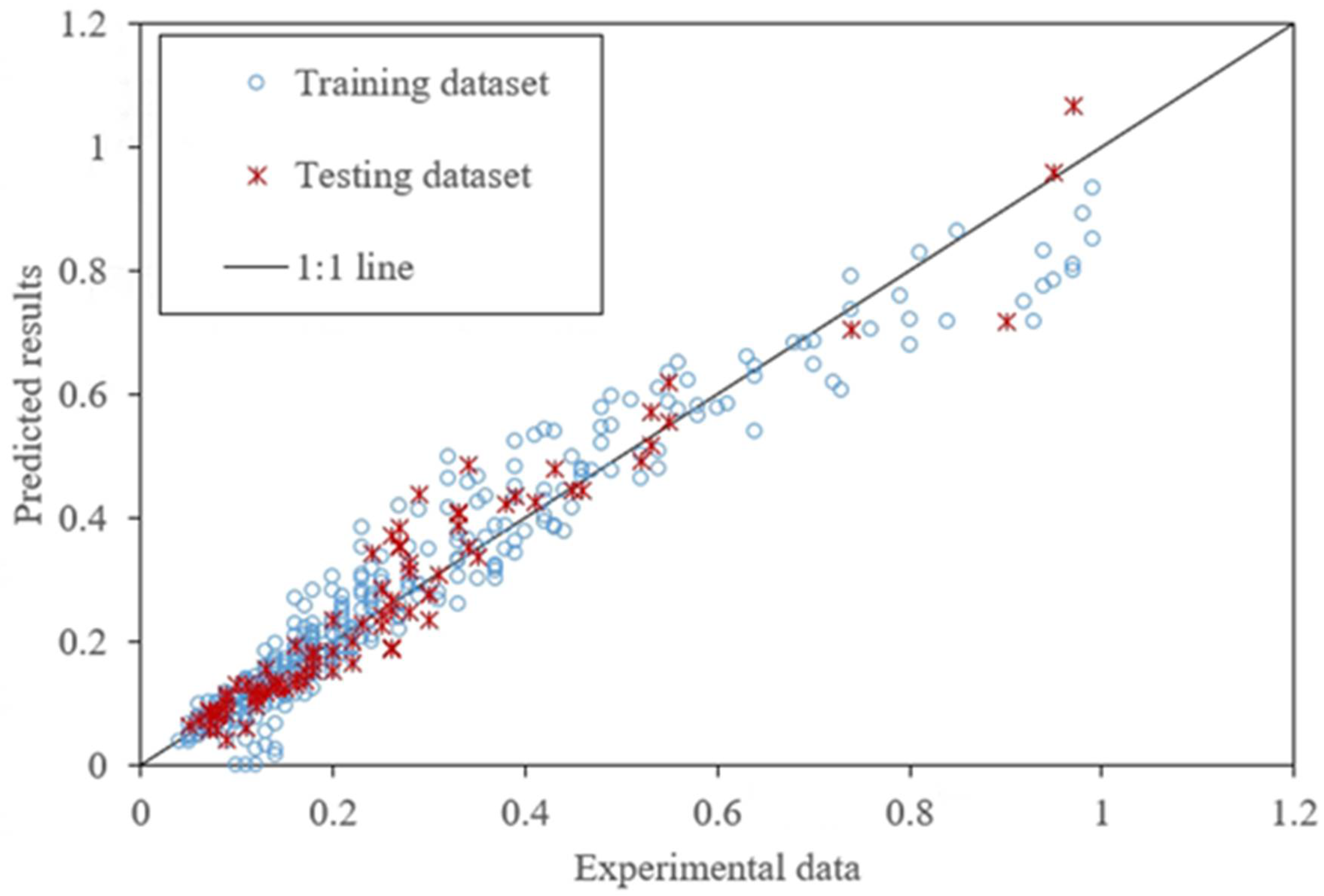
3.1. General Performance
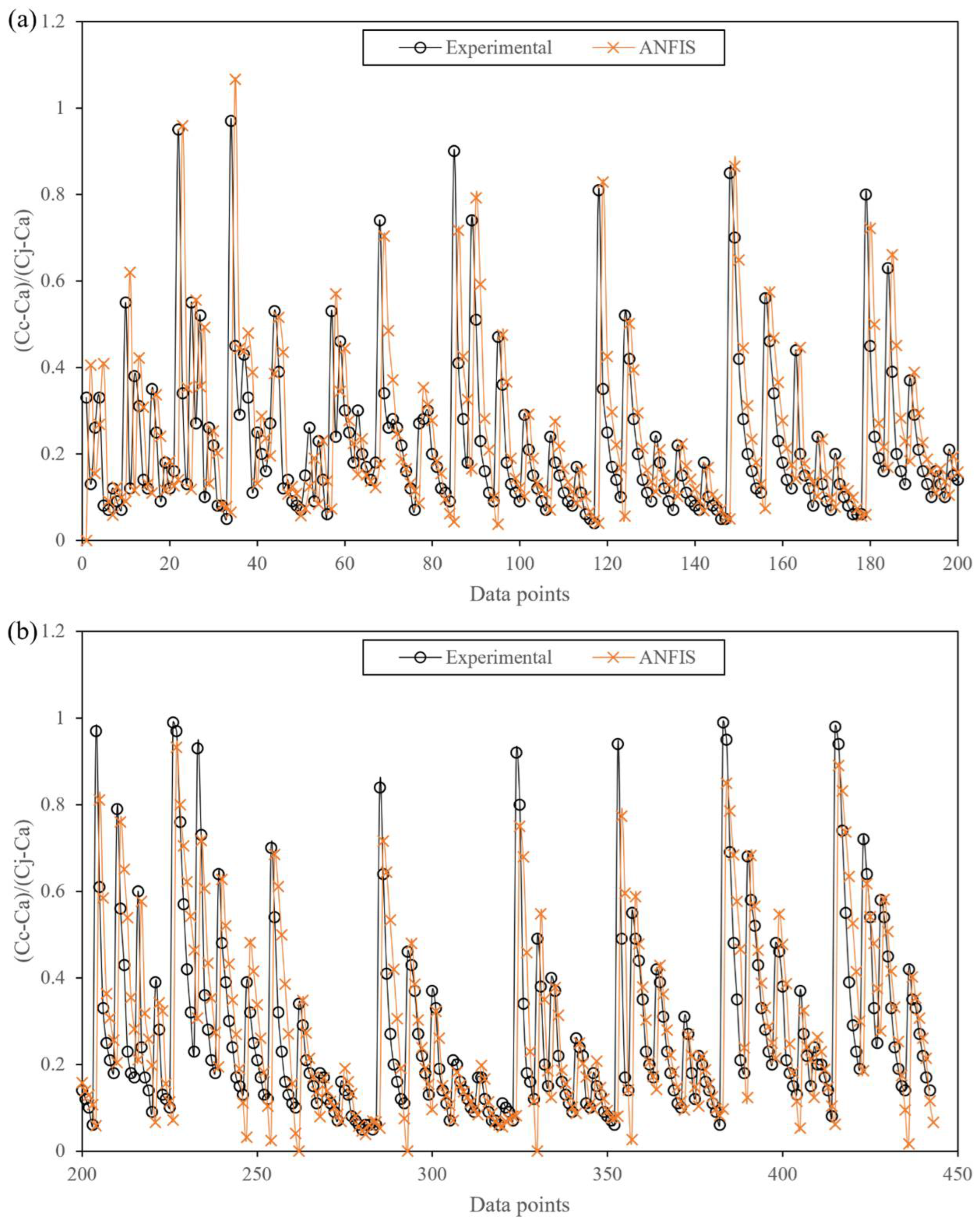
3.2. Comparisons of Observed and Predicted Results
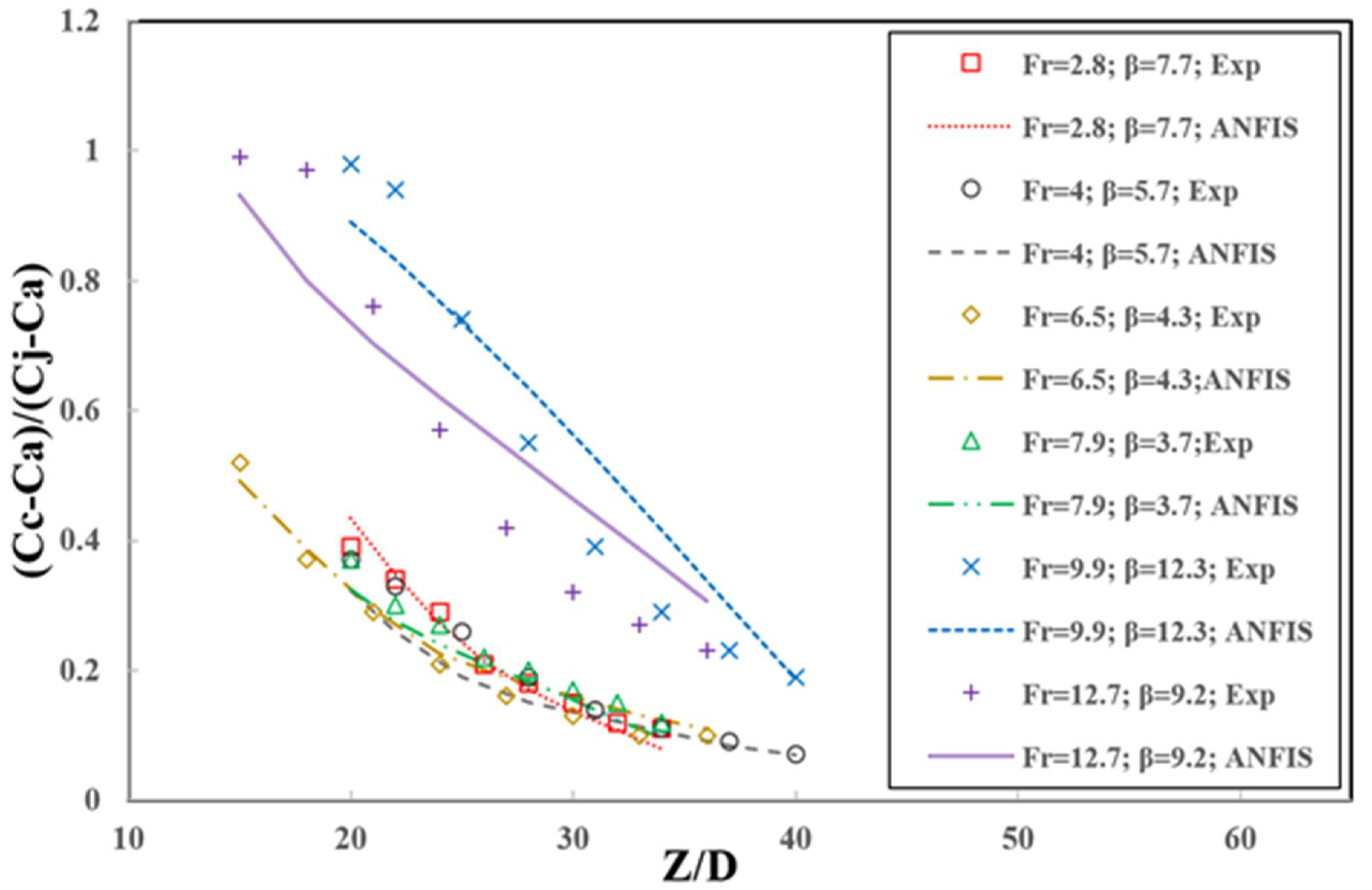
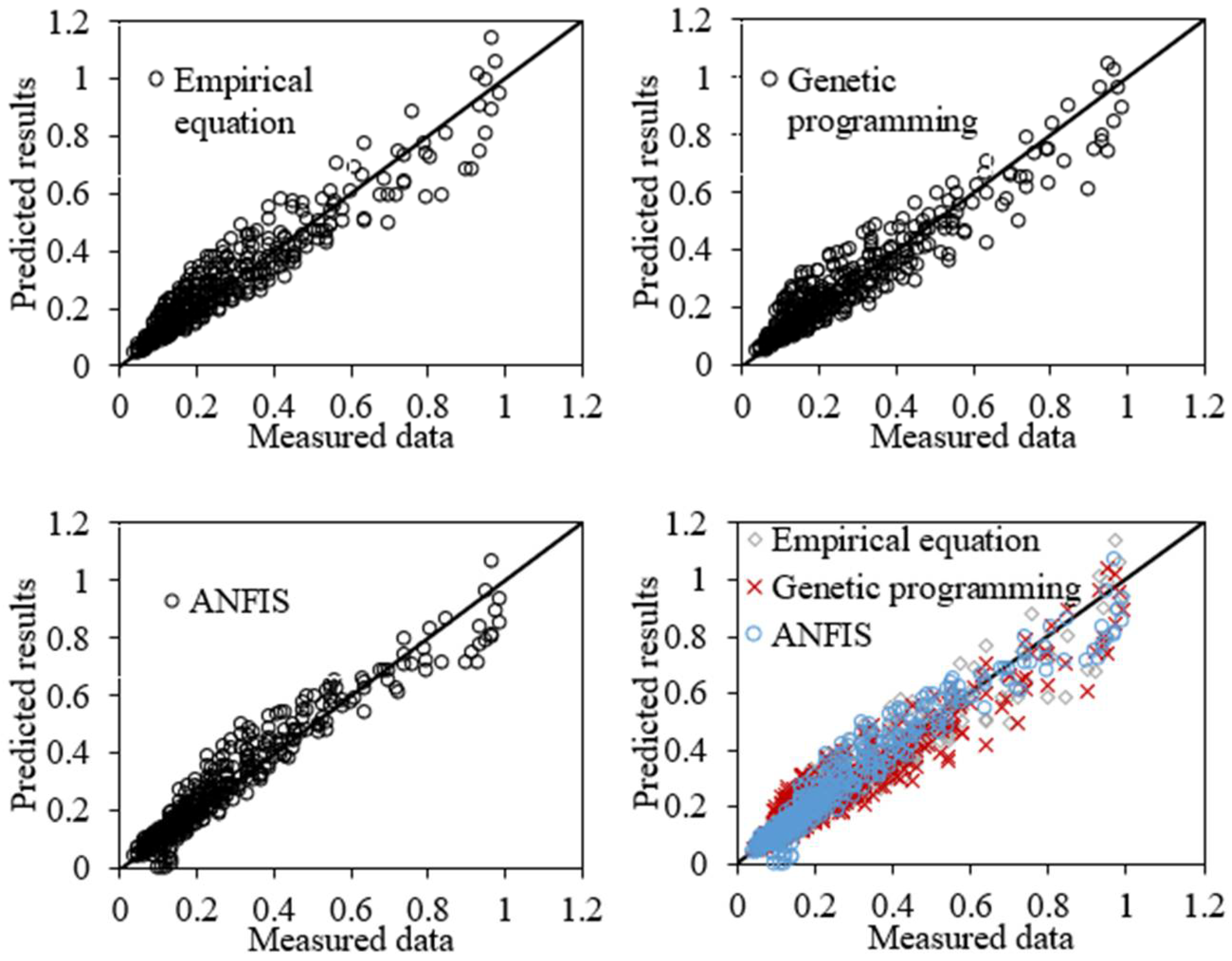
3.3. Comparison with the Empirical Equations and Genetic Programming Methods
3.4. Novelty and Limitations
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Chow, A.C.; Shrivastava, I.; Adams, E.E.; Al-Rabaie, F.; Al-Anzi, B. Unconfined dense plunging jets used for brine disposal from desalination plants. Processes 2020, 8, 696. [Google Scholar] [CrossRef]
- Hussein, H.; Capp, S.; George, W. Velocity measurements in a high-Reynolds-number, momentum-conserving, axisymmetric, turbulent jet. J. Fluid Mech. 1994, 258, 31–75. [Google Scholar] [CrossRef] [Green Version]
- Mohammadian, A.; Gildeh, H.K.; Nistor, I. CFD modeling of effluent discharges: A review of past numerical studies. Water 2020, 12, 856. [Google Scholar] [CrossRef] [Green Version]
- Kheirkhah Gildeh, H.; Mohammadian, A.; Nistor, I. Inclined dense effluent discharge modelling in shallow waters. Environ. Fluid Mech. 2021, 21, 955–987. [Google Scholar] [CrossRef]
- Ardalan, H.; Vafaei, F. CFD and Experimental Study of 45° Inclined Thermal-Saline Reversible Buoyant Jets in Stationary Ambient. Environ. Process 2019, 6, 219–239. [Google Scholar] [CrossRef]
- Wu, J.Y.; Lv, R.R.; Huang, Y.Y.; Yang, G. Flow structure transition and hysteresis of turbulent mixed convection induced by a transverse buoyant jet. Int. J. Heat Mass Transf. 2021, 177, 121310. [Google Scholar] [CrossRef]
- Khosravi, M.; Javan, M. Three-dimensional flow structure and mixing of the side thermal buoyant jet discharge in cross-flow. Acta Mech. 2020, 231, 3729–3753. [Google Scholar] [CrossRef]
- Xu, Z.; Otoo, E.; Chen, Y.; Ding, H. 2D PIV measurement of twin buoyant jets in wavy cross-flow environment. Water 2019, 11, 399. [Google Scholar] [CrossRef] [Green Version]
- Turner, J.S. Turbulent entrainment: The development of the entrainment assumption, and its application to geophysical flows. J. Fluid Mech. 1986, 173, 431–471. [Google Scholar] [CrossRef]
- Morton, B.R.; Taylor, G.I.; Turner, J.S. Turbulent gravitational convection from maintained and instantaneous sources. Proc. R. Soc. Lond. Ser. A. Math. Phys. Sci. 1956, 234, 1–23. [Google Scholar]
- Manins, P.C. Turbulent buoyant convection from a source in a confined region. J. Fluid Mech. 1979, 91, 765–781. [Google Scholar] [CrossRef]
- Lee, A.W.T.; Lee, J.H.W. Effect of lateral confinement on initial dilution of vertical round buoyant jet. J. Hydraul. Eng. 1998, 124, 263–279. [Google Scholar] [CrossRef]
- Yan, X.; Mohammadian, A. Numerical Modeling of Vertical Buoyant Jets Subjected to Lateral Confinement. J. Hydraul. Eng. 2017, 143, 04017016. [Google Scholar] [CrossRef] [Green Version]
- Kreyenberg, P.J.; Bauser, H.H.; Roth, K. Velocity field estimation on density-driven solute transport with a convolutional neural network. Water Resour. Res. 2019, 55, 7275–7293. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Tian, D.; Lowe, L.; Kalin, L.; Lehrter, J. Deep learning for daily precipitation and temperature downscaling. Water Resour. Res. 2021, 57, e2020WR029308. [Google Scholar] [CrossRef]
- Kabir, S.R.; Patidar, S.; Xia, X.; Liang, Q.; Pender, G. A deep convolutional neural network model for rapid prediction of fluvial flood inundation. J. Hydrol. 2020, 590, 125481. [Google Scholar] [CrossRef]
- Lei, X.; Chen, W.; Panahi, M.; Falah, F.; Bian, H. Urban flood modeling using deep-learning approaches in Seoul, South Korea. J. Hydrol. 2021, 601, 126684. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, Z.; Hong, H.; Peng, L. Flood susceptibility mapping using convolutional neural network frameworks. J. Hydrol. 2020, 582, 124482. [Google Scholar] [CrossRef]
- Yang, S.; Yang, D.; Chen, J.; Santisirisomboon, J.; Zhao, B. A physical process and machine learning combined hydrological model for daily streamflow simulations of large watersheds with limited observation data. J. Hydrol. 2020, 590, 125206. [Google Scholar] [CrossRef]
- Eltner, A.; Bressan, P.O.; Akiyama, T.; Gonalves, W.N.; Marcato Junior, J. Using deep learning for automatic water stage measurements. Water Resour. Res. 2021, 57, e2020WR027608. [Google Scholar] [CrossRef]
- Bashiri, H.; Sharifi, E.; Singh, V.P. Prediction of local scour depth downstream of sluice gates using harmony search algorithm and artificial neural networks. J. Irrig. Drain. Eng. 2018, 144, 06018002. [Google Scholar] [CrossRef]
- Moroni, D.; Pieri, G.; Tampucci, M. Environmental Decision Support Systems for Monitoring Small Scale Oil Spills: Existing Solutions, Best Practices and Current Challenges. J. Mar. Sci. Eng. 2019, 7, 19. [Google Scholar] [CrossRef] [Green Version]
- Dolan, K.D.; Yang, L.; Trampel, C.P. Nonlinear regression technique to estimate kinetic parameters and confidence intervals in unsteady-state conduction-heated foods. J. Food Eng. 2007, 80, 581–593. [Google Scholar] [CrossRef]
- Kisi, O. Suspended sediment estimation using neuro-fuzzy and neural network approaches. Hydrol. Sci. J. 2005, 50, 696. [Google Scholar] [CrossRef]
- Akpınar, A.; Özger, M.; Kömürcü, M.I. Prediction of wave parameters by using fuzzy inference system and the parametric models along the south coasts of the Black Sea. J. Mar. Sci. Technol. 2014, 19, 1–14. [Google Scholar] [CrossRef]
- Mandal, S.; Rao, S.; Harish, N. Damage level prediction of non-reshaped berm breakwater using ANN, SVM and ANFIS models. Int. J. Nav. Archit. Ocean. Eng. 2012, 4, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Mohammadian, A. Evolutionary modeling of inclined dense jets discharged from multiport diffusers. J. Coast. Res. 2019, 36, 362–371. [Google Scholar] [CrossRef]
- Yan, X.; Mohammadian, A. Multigene Genetic-Programming-Based Models for Initial Dilution of Laterally Confined Vertical Buoyant Jets. J. Mar. Sci. Eng. 2019, 7, 246. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Mohammadian, A. Evolutionary prediction of the trajectory of a rosette momentum jet group in flowing currents. J. Coast. Res. 2020, 36, 1059–1067. [Google Scholar] [CrossRef]
- Jang, J.-S.R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Tatikonda, R.C.; Battula, V.P.; Kumar, V. Control of inverted pendulum using adaptive neuro fuzzy inference structure (ANFIS). In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010. [Google Scholar]
- Xue, X.; Yang, X. Application of the adaptive neuro-fuzzy inference system for prediction of soil liquefaction. Nat. Hazards 2013, 67, 901–917. [Google Scholar] [CrossRef]
- Sayama, H.; Pestov, I.; Schmidt, J.; Bush, B.J.; Wong, C.; Yamanoi, J.; Gross, T. Modeling complex systems with adaptive networks. Comput. Math. Appl. 2013, 65, 1645–1664. [Google Scholar] [CrossRef] [Green Version]
- Yadollahi, M.M.; Benli, A.; Demirboga, R. Application of adaptive neuro-fuzzy technique and regression models to predict the compressive strength of geopolymer composites. Neural Comput. Appl. 2017, 28, 1453–1461. [Google Scholar] [CrossRef]
- Hosseini, M.S.; Moradi, M.H. Adaptive fuzzy-sift rule-based registration for 3D cardiac motion estimation. Appl. Intell. 2022, 52, 1615–1629. [Google Scholar] [CrossRef]
- Searson, D.P. GPTIPS 2: An open-source software platform for symbolic data mining. In Handbook of Genetic Programming Applications; Springer: Cham, Switzerland, 2015; pp. 551–573. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Training Dataset | Testing Dataset | Entire Dataset |
|---|---|---|---|
| MBE | 0.000 | 0.007 | 0.002 |
| MAE | 0.037 | 0.034 | 0.036 |
| RMSE | 0.054 | 0.049 | 0.053 |
| R2 | 0.934 | 0.938 | 0.934 |
| Index | Empirical Equation | Genetic Programming | ANFIS |
|---|---|---|---|
| RMSE | 0.068 | 0.067 | 0.053 |
| R2 | 0.895 | 0.894 | 0.934 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; He, J.; Yan, X.; Liu, J. Using an Adaptive Neuro-Fuzzy Inference System to Predict Dilution Characteristics of Vertical Buoyant Jets Subjected to Lateral Confinement. J. Mar. Sci. Eng. 2022, 10, 439. https://doi.org/10.3390/jmse10030439
Zhao Y, He J, Yan X, Liu J. Using an Adaptive Neuro-Fuzzy Inference System to Predict Dilution Characteristics of Vertical Buoyant Jets Subjected to Lateral Confinement. Journal of Marine Science and Engineering. 2022; 10(3):439. https://doi.org/10.3390/jmse10030439
Chicago/Turabian StyleZhao, Yufeng, Junshi He, Xiaohui Yan, and Jianwei Liu. 2022. "Using an Adaptive Neuro-Fuzzy Inference System to Predict Dilution Characteristics of Vertical Buoyant Jets Subjected to Lateral Confinement" Journal of Marine Science and Engineering 10, no. 3: 439. https://doi.org/10.3390/jmse10030439